

Developer Guide#
The MTRotator CSC is implemented using ts_salobj and ts_hexrotcom.
API#
The primary class is:
RotatorCsc: the CSC.
lsst.ts.mtrotator Package#
Functions#
Run the MTRotator commander. |
|
Run the MTRotator CSC. |
Classes#
|
Values for |
Configuration: rotConfigTelemetryStreamStructure_t in Moog code. |
|
|
Mock MT rotator controller that talks over TCP/IP. |
|
Command the MTRotator CSC from the command-line. |
|
MTRotator CSC. |
|
Enabled substate parameters. |
Telemetry: rotTelemetryStreamStructure_t in Moog code. |
|
|
Vibration detector to monitor the low-frequency vibration. |
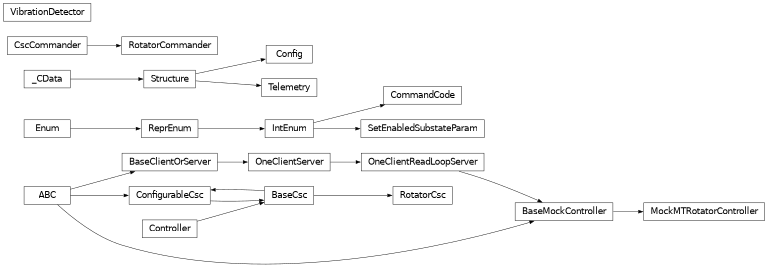
Class Inheritance Diagram#
Build and Test#
This is a pure python package. There is nothing to build except the documentation.
setup -r .
pytest -v # to run tests
package-docs clean; package-docs build # to build the documentation
Contributing#
ts_mtrotator is developed at lsst-ts/ts_mtrotator.
You can find Jira issues for this package using labels=ts_mtrotator..